
自動運転の課題「歩行者への対応」 新技術を開発
一般道で自動運転を実現する際に、難しいのが歩行者への対応。この課題を解決する新技術が開発されました。
減速時の乗り心地にも配慮
一般道でクルマの自動運転を実現する際に、難しい課題のひとつが歩行者への対応です。このほど、この課題の解決策として、クルマが自動で歩行者の行動を予測し、衝突を防ぐ基本技術が開発されました。
この技術は、日立製作所、日立オートモティブシステムズ、クラリオンが2015年10月14日(水)に発表。「有効性を実験車にて確認」(日立)したといいます。
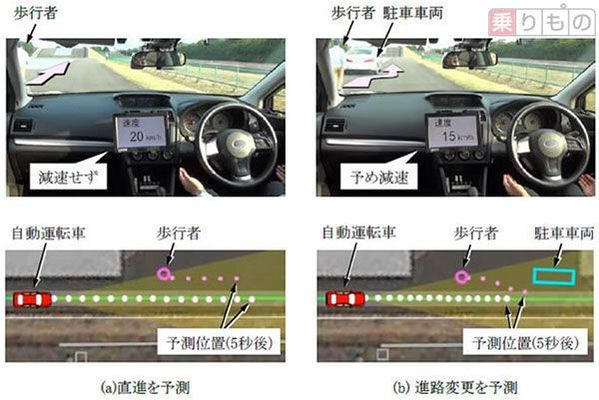
発表によると、歩行者の行動予測を行う方法として、ロボットの移動経路を計画する技術を応用。現在の位置関係から、クルマが自動的に、歩行者が将来どう行動するかを予測するというものです。コンピューターの処理速度が従来の約200倍に高められ、リアルタイムで高い精度による予測が可能になりました。
この技術では、クルマの乗り心地にも配慮。歩行者と衝突の危険性があると予測された場合、可能な限り滑らかに減速することが可能とのことです。
今回の技術開発にたずさわった各社は今後、米国ミシガン大学の研究施設を利用するなどして、実験車による評価検証を重ねていく予定としています。
【了】












{kind=link}
コメント